Introduction
Le vol aux instruments ou IFR (Instrument Flight Rules) ne se limite pas à l’emploi d’instruments pour naviguer quand la visibilité devient insuffisante pour pratiquer le vol à vue. Ce régime de vol est un vaste ensemble de règles et de procédures définis précisément par la réglementation. A l’exception du vol privé en avion léger, l’immense majorité du transport aérien commercial est opéré sous le régime IFR. Par conséquent, Flight Simulator et la simulation de vol en générale suscite un intérêt très fort pour le vol aux instruments. Que l’utilisateur vole en réseau ou hors ligne, avec ou sans contrôle aérien, par belle ou mauvaise météo, l’offre d’appareils toujours plus réalistes pour nos simulateurs rend inévitable la nécessité de la connaissance du vol aux instruments pour pouvoir dompter et exploiter tous le potentiel du vol et des formidables possibilités offertes par les éditeurs de logiciels. Bien qu’il soit tentant de vouloir se lancer directement dans l’IFR aux commandes d’un avion de ligne favori, ou du moins de tout avion complexe, il ne sera jamais aisé d’en avoir une bonne maitrise sans avoir acquis les bases de la science du vol aux instruments. L’objectif de ce module est d’acquérir les bases du vol aux instruments et limitera à un certain cadre. Cela signifie que nous allons ici envisager cette formation dans les conditions d’un élève qui passe sa qualification de base, à savoir sur un avion monomoteur en utilisant les moyens de radionavigation conventionnels. Ce manuel établit les bases théoriques essentielles à assimiler avec une approche à la fois précise mais simple et didactique afin que la matière soit accessible à tous. Nous ne rentrerons pas ici dans des considérations techniques trop poussées qui pourraient nous éloigner de notre objectif qui est avant tout récréatif. Avant de commencer ce cours, il est nécessaire de préciser que nous utiliserons les normes définies par l’OACI, c’est-à-dire au niveau mondial pour nous référer à la règlementation en matière de procédures aux instruments. Soyons toutefois conscients que des nuances puissent exister entre les différentes autorités aériennes, comme entre l’EASA (Europe) ou la FAA (Etats Unis) en particulier.
Table des matières
1 Principes de base
.....1.1 Définitions
..........1.1.1 Aérodynamique
..........1.1.2 Attitude
..........1.1.3 Altitude
..........1.1.4 Direction
..........1.1.5 Vitesse
..........1.1.6 En résumé : le triangle des vitesses
.....1.2. Instruments Primaires
..........1.2.1 Horizon artificiel (AI
..........1.2.2 Altimètre - Alimeter
..........1.2.3 Indicateur de vitesse verticale (VSI) – Vertical Speed Indicator
..........1.2.4 Indicateur de vitesse (ASI) – Air Speed Indicator
..........1.2.5 Indicateur de virage – Turn and Slip
..........1.2.6 Compas magnétique – Magnetic compass
..........1.2.7 Conservateur de cap (DG) – Directionnal Gyro
..........1.2.8 Compas Gyromagnétique (HSI) – Gyromagnetic Compass
.....1.3.Le pilotage aux instruments
..........1.3.1 Le Balayage ou Scan - Selective Radial Scan
..........1.3.2 Vol rectiligne en palier
..........1.3.3 Virage
..........1.3.4 Montée et Descente à vitesse constante
..........1.3.5 Montée et Descente à taux constant
..........1.3.6 Navigation verticale
..........1.3.7 Correct de dérive
..........1.3.8 Effet du vent sur la vitesse
2. Aides à la radio navigation
.....2.1 ADF/NDB
..........2.1.1 Principe
..........2.1.2 Instrument
.....2.2 VOR
..........2.2.1 Principe
..........2.2.2 Instrument
.....2.3 DME
..........2.3.1 Principe
..........2.3.2 Instrument
.....2.4 ILS.
..........2.4.1 Principe
3.Navigation
.....3.1 Navigation VOR.
..........3.1.1 Position
..........3.1.2 QDM/QDR
..........3.1.3 Interception de radiale
..........3.1.4 Passage à la verticale
..........3.1.5 Effets du vent
.....3.2 Navigation ADF
..........3.2.1 Position
..........3.2.2 Interception
..........3.2.3 Effets du vent
4 Procédures
.....4.1 Circuit d'attente - Holding Pattern
.....4.2 Virages de procédures – Reversal Procedure
.....4.3 Arc DME
5 Approches
.....5.1 Segments
.....5.2 Classification
.....5.3 Minimas & Catégories
.....5.4 Typeq d'Approches
..........5.4.3 Approches à vue / Circle to land
1. Principes de base
1.1 Définitions
1.1.1 Aérodynamique
Sans nous attarder dans un cours de mécanique du vol, voici un bref rappel des notions fondamentales des forces aérodynamique s’exerçant sur l’aéronef :
Poids (W) - Weight : Force exercée par la gravité terrestre sur l’avion
Portance (L) - Lift : Force verticale ascendante générée par le déplacement de l’avion et perpendiculaire à celui-ci
Poussée (T)- Thrust : Force horizontale vers l’avant produite par le moteur
Trainée (D)- Drag : Force horizontale opposée à la poussée et crée par la résistance à l’air
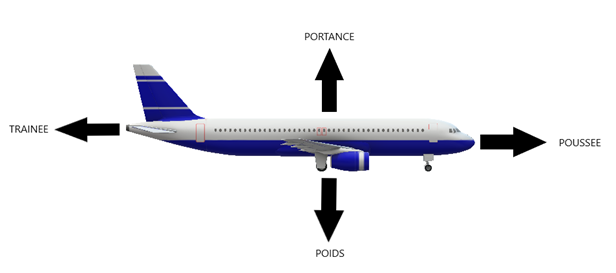
La portance s’oppose au poids, la poussée s’oppose à la trainée.
Facteur de charge (n) – Load Factor : C’est le rapport entre le poids réel et le poids apparent de l’avion. En vol horizontal stabilisé, il est de 1 (1G) :
- En virage, il augmente avec l’inclinaison car la force centrifuge vient s’ajouter au poids de l’avion.
- En vol rectiligne, il varie en cas de variation rapide de la trajectoire sur le plan vertical
En vol rectiligne horizontale, la portance équilibre le poids.
IMAGE
En virage, le facteur de charge créé par la force centrifuge alourdit l’avion plus qu’il ne l’est réellement: c’est le poids apparent. Pour éviter que l’avion ne descende et maintienne l’altitude, il faut compenser en augmentant la portance.
1.1.2 Attitude
Assiette (ATT) – Pitch Atttitude : Angle entre l’axe longitudinale de l’avion et l’horizontal
Pente (FPA)- Flight Path Angle/Slope : Angle entre la trajectoire de l’avion et l’horizontal
Incidence (AOA) – Angle of Attack* : Angle entre l’axe longitudinal de l’avion et la trajectoire
Vent relatif – Relative Airflow : Ecoulement de l’air parallèle à la trajectoire de l’avion
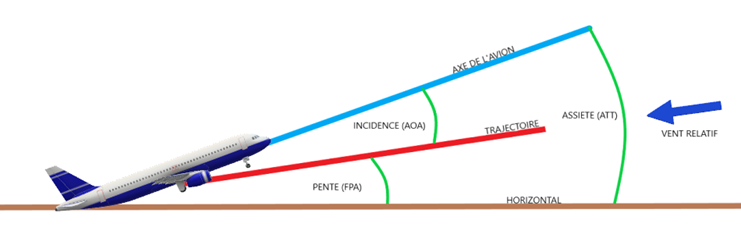
- L’assiette (ATT) s’affiche sur l’horizon artificiel.
- La pente (FPA) permet de suivre la trajectoire d’approche ou de montée désirée.
- L’incidence (AOA) nous renseigne sur les performances aérodynamiques, notamment le décrochage.
*Il y a en toute rigueur une nuance entre l’angle d’incidence et l’angle d’attaque, mais pour des raisons de simplification, nous les associerons dans ce cours.
1.1.3 Altitude
Atmosphère Standard (ISA) – International Standard Atmosphere : Par convention, lorsque que les conditions atmosphériques au niveau de la mer sont :
Température extérieure (OAT) : 15°C
Pression : 1013.25 hPa.
Altitude (AMSL) – Altitude Above Mean Sea Level : Hauteur par rapport au niveau moyen de la mer :
Indiquée : lue sur l’altimètre
Vraie : corrigée de la variation de la densité
Hauteur (AGL) – Altitude Above Ground Level : Hauteur par rapport au sol
Niveau de vol (FL) – Flight Level: Altitude par rapport à la référence de 1013.25 hPa
QNH: Pression atmosphérique mesurée au niveau moyen de la mer
QFE: Pression atmosphérique mesurée sur un aérodrome
Altitude de transition (TA): Pendant la montée, altitude au-dessus de laquelle on exprime la Hauteur en Niveau de Vol (FL)
Niveau de transition (TL): Pendant la descente, niveau de vol en dessous duquel on exprime la Hauteur en Altitude (AMSL)
Vitesse Verticale (V/S) – Vertical Speed : Taux de descente ou de montée exprimé généralement en pied par minute (Ft/mn)
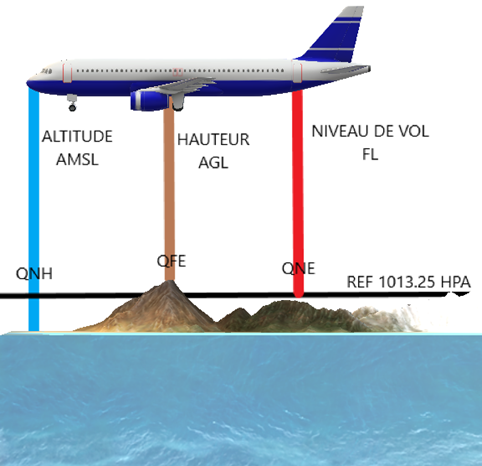
- Lorsque que l’on règle dans le baromètre de l’altimètre :
- le QNH, on obtient l’altitude
- le QFE, la hauteur par rapport au terrain
- le QNE, le niveau de vol
1.1.4 Direction
Cap (HDG) - Heading : Direction exprimée en degré où pointe l’axe de l’avion
Route (TRK) - Route : Direction de l’avion exprimée en degré par rapport au sol
Vent traversier (X-Wind) – Cross Wind : Composante perpendiculaire du vent par rapport à l’axe de l’avion exprimé en unité de vitesse (généralement en kt)
Angle de correction de dérive (WCA)- Wind Correction Angle : Angle entre le Cap nécessaire (HDG) pour compenser l’effet du vent traversier et la Route désirée (TRK)
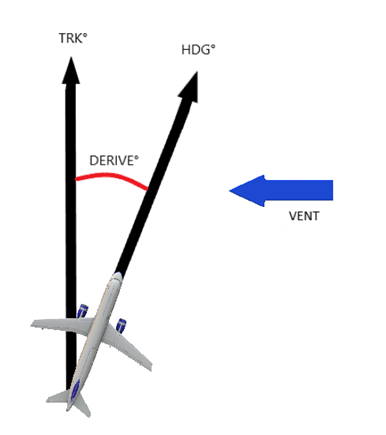
Pour suivre une route constante, il faut mettre le cap au vent pour compenser le vent traversier.
L’angle de correction de dérive à appliquer dépend à la fois de la composante latérale du vent et de la vitesse vraie de l’avion.
Déclinaison magnétique (D) : Angle entre la direction du Nord magnétique et le Nord géographique
Déviation (d) : Angle entre la direction du Nord compas et du Nord magnétique
Variation (W) : Angle entre la direction du Nord compas et le Nord vrai
Cap/Route vrai (Cv/Rv) – True Heading/Route : Cap/Route par rapport au Nord géographique
Cap/Route magnétique (Cm/Rm) – Magnetic Heading/Route : Cap/Route par rapport au Nord magnétique
Cap/Route compas (Cc/Rc) – Compass Heading/Route : Cap/Route par rapport au Nord compas
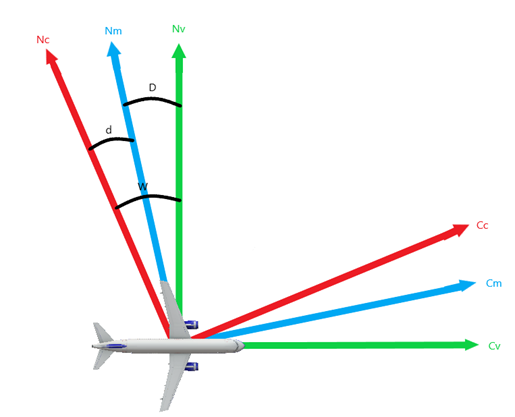
Dans le schéma ci-dessus, il s’agit du cap mais le principe s’applique également à la route.
1.1.5 Vitesse
Vitesse indiquée (IAS) – Indicated Airspeed : Vitesse mesurée par la sonde Pitot et affichée sur l’anémomètre
Vitesse conventionnelle (CAS) – Calibrated Airspeed : Vitesse indiquée corrigée des erreurs instrumentales
Vitesse vraie (TAS) – True Airpseed : Vitesse calculée du déplacement dans la masse d’air et corrigée de la densité de l’air
Vitesse sol (GS) – Ground Speed : Vitesse par rapport au sol et corrigée du vent effectif (de face ou arrière)
Vent arrière / de face (TL/HD) – Tailwind/Headwind : Composante du vent parallèle au déplacement de l’avion
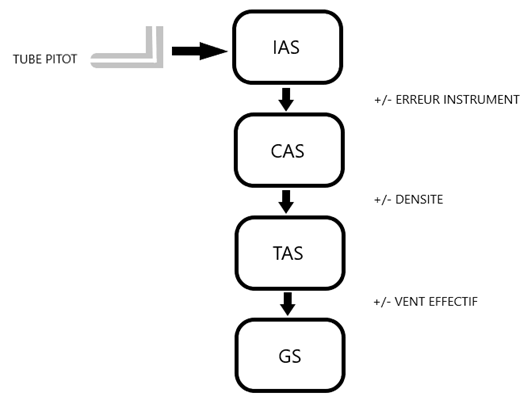
L’IAS est mesurée par l’instrument. Les CAS, TAS et GS en sont déduits par calcul.
Nombre de Mach (M.XX) – Mach Number: Rapport entre la Vitesse vraie et celle du son.
1.1.6 En résumé : le triangle des vitesses
Le triangle des vitesses synthétise à lui seul l’effet du vent sur la direction et la vitesse de l’avion en vol et permet de se représenter visuellement la situation.
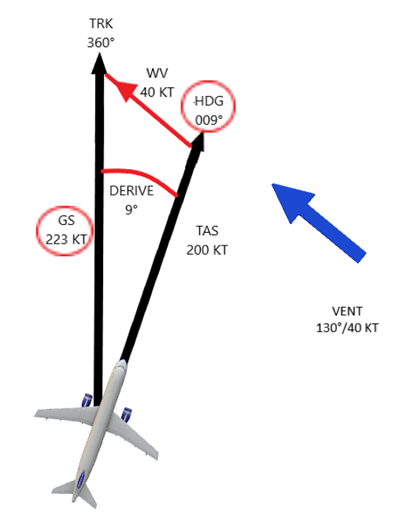
Détaillons la situation avec l’exemple ci-dessus :
Nous devons suivre une route (TRK) de 360° et notre vitesse vraie (TAS) est de 200 kts. Nous avons un vent venant d’une direction de 130° pour une vitesse de 40 kts. On remarque que le vent vient de notre arrière droit.
Quelle cap doit ont suivre pour suivre cette route ?
Nous devons donc déterminer l’angle de correction dérive (WCA). Pour ce faire, nous pouvons utiliser l’excellent outil de calcul E6BX qui permet de faire l’économie de fastidieux calculs.
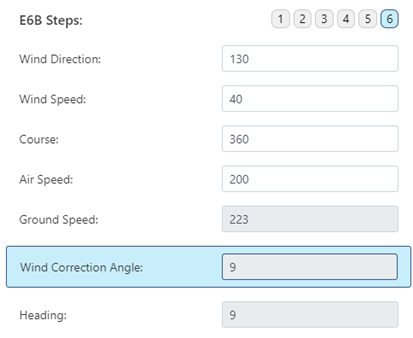
- La correction de dérive à appliquer est de 9° au vent, donc : 360° + 9° = 9°. Il faut donc suivre un cap (HDG) 009°.
- La composante de vent arrière porte notre vitesse sol (GS) à 223 kts.
En conclusion, plus le vent traversier sera fort, plus l’angle de correction de dérive nécessaire sera grand pour pouvoir conserver notre route.
1.2 Instruments Primaires
1.2.1 Horizon artificiel (AI)
L’horizon artificiel est le principal instrument de control du vol aux instruments. Sans visibilité extérieure, le pilote l’utilise pour connaitre l’assiette et l’inclinaison de l’avion.
Il consiste en une maquette représentant la position de l’avion par rapport à l’horizon sur deux axes gradués (vertical pour l’assiette, horizontale pour l’inclinaison).
Sur les avions légers, la mesure est généralement fournie par un gyroscope à 2 degrés de liberté. Les avions modernes tendent à être équipés de systèmes électro mécaniques plus sophistiqués de type AHRS (Attitude and Heading Reference System), comme c’est le cas pour l’avionique Garmin 1000 par exemple.

Un horizon artificiel classique. En cas de fortes vibration ou accélération, il tend à se dérégler. Il est alors nécessaire de la calibrer à l’horizontal en tirant la molette « PULL TO CAGE ».

Ici, l’écran de vol principal d’une avionique Garmin 1000 désormais très répandue en aviation générale. Cet écran regroupe les instruments primaires dont un affichage digital de l’horizon artificiel (au centre). Ce dernier est alimenté par l’AHRS et n’est pas sujet aux erreurs mécaniques.
1.2.2 Altimètre - Alimeter
L’altimètre est un baromètre qui mesure l’altitude par rapport à la pression de référence entrée dans la fenêtre (tel que nous l’avons vu dans la partie 1.1.3). Il prend sa source depuis une prise statique située à l’extérieur du fuselage. La graduation est en pieds (Ft), mais notons que certains altimètres soient également capable d’afficher l’altitude en mètre (pour la conversion lorsque l’on vole dans certains pays utilisant le système métrique).
Plus la température extérieure dévie de l’ISA, plus l’altitude indiquée divergera de l’altitude vraie à cause de l’effet de la densité. Quand l’écart devient trop important, il est alors nécessaire d’appliquer une correction.
Ici, un altimètre classique à aiguille. La petite aiguille désigne les milliers, la grande les centaines, et le triangle les dizaines de milliers de pieds. Le baromètre affiche 1013hpa (ou 29.9 Inch). Nous volons ici à 5000 ft.

Cette fois, l’altimètre digital du G1000. Le baromètre réglé en « STD BARO » signifie que nous volons au niveau de vol FL050.
1.2.3 Indicateur de vitesse verticale (VSI) – Vertical Speed Indicator
Cet instrument, appelé également Variomètre indique la vitesse ascensionnelle, c’est à dire le taux de montée ou de descente. Il mesure la variation de la pression statique et l’affiche sur une échelle graduée en pieds par minute (ft/mn).
Son principal défaut est sa lenteur car l’affichage de la vitesse verticale se fait avec un retard de 5 secondes environ du à sa conception. Les avions plus complexes sont en principe équipés d’un instrument plus perfectionné (IVSI) s’affranchissant de cette erreur.
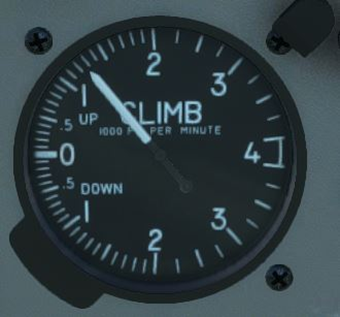
Au gauche, sur ce VSI classique, la vitesse verticale est ici de 750 ft/mn en montée. Remarquons que l’échelle est logarithmique. En effet, les graduations sont plus précises entre -2000 et +2000ft/mn.
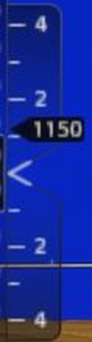
A droite, le VSI digital permet une lecture du taux encore plus précise. Nous montons ici à 1150 ft/mn.
1.2.4 Indicateur de vitesse (ASI) – Air Speed Indicator
Appelé aussi Anémomètre ou Badin, c’est un manomètre qui mesure la pression dynamique résultant de la différence entre la pression statique et la pression totale. Celle-ci reflète la vitesse de l’avion par rapport à la masse d’air. L’instrument est alimenté par une sonde installée dans l’écoulement de l’air appelée tube Pitot.
L’Indicateur de vitesse affiche la vitesse indiquée et constitue la référence principale pour le pilote sur le plan aérodynamique, indépendamment des conditions atmosphériques. Il est gradué le plus souvent en nœuds (kt) ou en kilomètre par heure (km/h) et affiche les références importantes du domaine de vol tel que la plage d’utilisation de volets, la vitesse de décrochage ou la survitesse.

A gauche un anémomètre classique gradué en nœuds (kt). Notons les plages de couleurs :
- Verte: Plage normale de vol
- Jaune: Plage de vol à éviter en air turbulent.
- Trait rouge : VNE (Vitesse à ne jamais dépasser)
- L’arc blanc représente la page d’utilisation des volets.

Son équivalent sur le G1000 peut également calculer et afficher la Vitesse vraie, ici une TAS de 134 kt.
1.2.5 Indicateur de virage – Turn and Slip
Il a la particularité d’être constitué de 2 instruments en 1.
L’indicateur de virage est un système gyroscopique montrant le sens et le taux de virage. Lors d’un vol aux instruments, le pilote s’en réfère notamment pour s’assurer que le virage est bien exécuté au taux standard de 3 degrés par seconde (Rate 1).
Le coordinateur de virage permet de vérifier la symétrie du vol grâce au déplacement pendulaire d’une petite bille baignant dans un tube rempli de liquide, et soumise aux forces d’accélérations transversales.

La maquette d’avion correspond à l’indicateur de virage. Quand l’une des ailes est alignée sur le trait « 2 MIN », cela signifie que le virage est effectué au taux standard. Le tube contenant la bille est le coordinateur de virage. Le pilote doit veiller à la garder au milieu en utilisant la gouverne de direction.
1.2.6 Compas magnétique – Magnetic compass
Comme son nom l’indique, il affiche le cap magnétique. Son fonctionnement repose sur une Rose des caps aimantée baignant dans un liquide. Celle s’oriente dans la direction du Nord magnétique (Nm) et est graduée de 0 à 360°.
Le compas magnétique n’est guère plus utilisée comme moyen primaire pour la navigation mais fait office d’instrument de secours et de référence pour le recalage du Conservateur de cap.
Il est de par sa conception sujet à des erreurs de lecture significatives, notamment en virage et lors des accélérations.

Dernier garde-fou de la navigation, le compas magnétique est présent dans tous les avions, y compris dans ceux équipés d’avioniques de dernières générations…
1.2.7 Conservateur de cap (DG) – Directionnal Gyro
Sur les avions légers approuvés IFR les plus basiques, le cap est encore indiqué par le conservateur de cap tel qu’on le retrouve pour le vol à vue.
Il s’agit généralement d’une rose entrainée par un gyroscope. Sa réactivité et sa stabilité permettent un affichage précis et quasi instantanée du cap en virage. Contrairement au compas, il ne subit pas les effets de l’accélération.
Son principal défaut est qu’il doit être recalé manuellement par le pilote car il n’utilise pas de référence extérieure et finit par dériver (environ 12°/heure): on parle de “précession”. Celle-ci est due à la fois aux frottements mécanique de l’instrument mais aussi à la rotation de la terre.

Le conservateur de cap se présente comme une simple rose des vents. Nous suivons ici un cap magnétique (Cm). 298°. Il se recale grâce à la molette « PUSH ».
1.2.8 Compas Gyromagnétique (HSI) – Gyromagnetic Compass
Des avions légers aux avions de ligne, le HSI (Horizontal Situation Indicator) est l’instrument de navigation standard pour le vol IFR et est bien plus complet et sophistiqué que ceux cités précédemment.
Comme le Conservateur de cap, il fonctionne grâce avec un gyroscope mais est cette fois ci asservi (slaved) à une valve de flux qui le cale en permanence sur le Nord magnétique (Nm). Ajoutons que sur les avioniques modernes glass cockpit, la source n’est plus un gyroscope et les informations proviennent du système AHRS ou des centrales à inertie.
Son principal atout est donc qu’il ne subit pas le phénomène de précession et affiche un cap fiable à tout moment. Il a de plus l’avantage de pouvoir intégrer l’affichage des moyens de radionavigation VOR ou ADF, et même d’être couplé à un système GPS/RNAV.

Ici, un HSI classique. Le cap est de 295°. L’aiguille jaune est l’indicateur VOR (que nous aborderons dans un chapitre suivant).

Cette fois, un HSI digital, toujours sur le G1000. La gestion par ordinateur permet d’intégrer d’autres informations utiles à la navigation, comme ici la vitesse et la direction du vent (252° / 19Kt).
1.3.Le pilotage aux instruments
1.3.1 Le Balayage ou Scan - Selective Radial Scan
En vol IFR, le pilote se réfère exclusivement aux instruments (notamment les instruments primaires que nous avons cités précédemment) pour controller son avion, indépendamment de la visibilité extérieure.
Il n’est ni possible ni souhaitable de regarder tous les instruments à la fois. Pour une efficacité optimale, les instruments se lisent dans une séquence définie selon la phase du vol: c’est le balayage radial sélectif. Cette méthode repose sur 3 principes:
Sélection des instruments:
- Primaires (AI, ASI, HSI, Altimètre, Indicateur de virage, VSI)
- Secondaires
Radial: Le balayage visuel débute généralement à partir des instruments primaires puis vers les instruments secondaires avant de revenir vers les instruments primaires. Dans l’immense majorité des cas, le scan débute depuis l’AI.
Répartition du temps. Un balayage typique se répartit comme suit:
- 80% du temps: instruments de contrôles
- 15% du temps: instruments de performances
- 5% du temps: instruments de position


1.3.2 Vol rectiligne en palier
Instruments primaires : AI, ALT, HSI
Scan:
- 80% ADI
- 15% ALT and HSI
- 5% Instruments secondaires
Méthode:
- Maintenir l’altitude en ajustant l’assiette.
- Maintenir le cap en gardant les ailes à l’horizontale.
- Maintenir la vitesse en réglant la puissance.
- Une fois stabilisé, régler le compensateur (trim).
- Garder la symétrie avec le palonnier.
- En cas de variation de la vitesse, ajuster l’attitude et trim le cas échéant.
PERFORMANCE = ATTITUDE + PUISSANCE
1.3.3 Virage
Instruments primaires : AI, ALT, Indicateur de virage, HSI
Scan :
- 80% ADI
- 15% ALT, Indicateur de virage, HSI
- 5% Instruments secondaires
Méthode:
- Virer du côté désiré en inclinant les ailes au taux standard.
- Maintenir la vitesse en augmentant la puissance.
- Maintenir l’altitude en augment l’assiette.
- NE PAS COMPENSER pendant le virage
- Garder la symétrie avec le palonnier.
- Anticiper la sortie du virage au cap désiré :
Nombre de degrés à anticiper = Inclinaison°/3
1.3.4 Montée et Descente à vitesse constante
Instruments primaires : AI, ASI, HSI
Scan :
- 80% ADI
- 15% ALT, ASI, HSI
- 5% Instruments secondaires
Méthode:
- Ajuster la puissance à la valeur désirée.
- Ajuster l’assiette jusqu’à atteindre la vitesse.
- Compenser (trim).
- Garder la symétrie avec le palonnier.
- Effectuer les corrections de vitesse en ajustant l’attitude.
- Compenser à nouveau le cas échéant.
VITESSE CONSTANTE + PUISSANCE FIXE > TAUX
1.3.5 Montée et Descente à taux constant
Instruments primaires : AI, VSI, HSI
Scan :
- 80% ADI
- 15% VSI, HSI
- 5% Instruments secondaires
Méthode:
- Ajuster l’assiette jusqu’à atteindre le taux désiré.
- Ajuster la puissance pour garder la vitesse désirée.
- Compenser (trim)
- Garder la symétrie avec le palonnier.
- Effectuer les corrections de taux en ajustant l’assiette.
- Effectuer les corrections de vitesse en ajustant la puissance.
- Compenser à nouveau le cas échéant.
TAUX CONSTANT+ VITESSE CONSTANTE > PUISSANCE
1.3.6 Navigation verticale
Pour déterminer le taux de montée ou de descente nécessaire, les procédures aux instruments (approches, départ) spécifient généralement un Gradient.
Il s’agit du ratio (en %) entre l’altitude et la distance. Pour référence, 1% correspond à:
- 1 mètre d’altitude par 100 mètres de distance parcouru.
- 60 ft d’altitude par 1 nm de distance parcouru.
Taux (ft/mn) = GS (kt) x Gradient (%)
Exemple :
On veut descendre avec un gradient de 5% à une vitesse sol de 100 kt
- 100 x 5 = 500
- On doit descendre à 500 ft/mn.
1.3.6 Correction de dérive
Le vent est omniprésent dans l’atmosphère et augmente avec l’altitude. Par conséquent, le pilote doit constamment être conscient de l’effet de celui-ci sur la trajectoire de l’avion, en particulier celui du vent traversier (X-Wind).
Pour ce faire, il est primordial de connaitre l’angle de correction de dérive (WCA) à appliquer afin de voler au cap (HDG) permettant de suivre la route (TRK) désirée.
Si le GPS est par nature capable de connaitre la route (TRK) puisqu’il détermine notre position au sol, lorsque l’on ne dispose pas de celui-ci à bord, il faut s’en remettre aux instruments conventionnels.
Avec seulement un HSI ou un DG comme référence, voici une technique rapide à appliquer en vol permettant d’estimer la correction nécessaire
1.Déterminer la composante de vent traversier (X-Wind) en divisant virtuellement la HSI/DG selon la règle des Deux tiers (Three Third Rule).
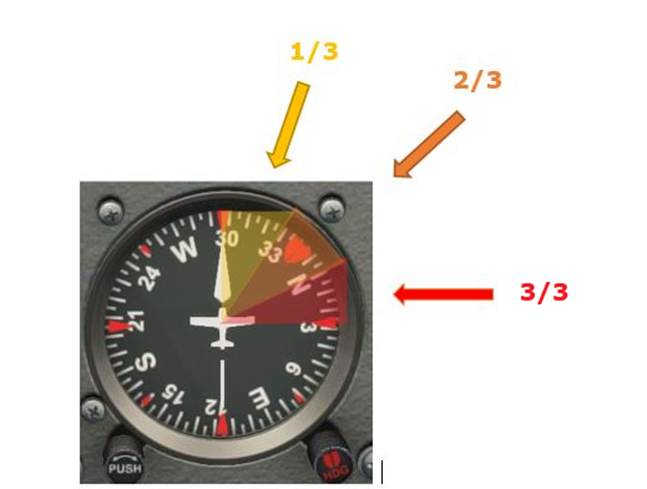
Il s’agit de se représenter chaque quart de la rose en 3 parties égales.
Dans le schéma ci-dessus, si le vent vient d’une direction comprise entre :
- 300° et 329°, on prend en compte 1/3 de la vitesse du vent.
- 330° et 359°, on prend 2/3.
- 360 et 029°, on prend 3/3.
- Etc… on continue ainsi en fonction de la provenance du vent.
2. Calculer l’angle de correction de dérive (WCA) avec la formule suivante :
WCA = X-Wind / (TAS/60)
3. Ajouter ou
soustraire le WCA au cap actuel selon le cas. Pour compenser, il faut
« rentrer » dans le vent face pour contrer son effet.
Exemple
Nous voulons une Route (TRK) 300° à une vitesse vraie (TAS) de 100 kt. La carte de vents publiée indique un vent du 340°/21 kt à notre altitude. Quelle est la correction estimée à appliquer ?
- X-Wind > 2/3 de 20 kts = 14kts
- WCA= 14/ (100/60)=100/60=8.4 (arrondi à 8°)
- HDG= 300-8 = 292°
Nous devons donc voler à un cap (HDG) 292° afin de suivre notre route (TRK) de 300°.
Le vent de référence sera celui publié dans les prévisions météorologiques que nous avons obtenu pendant la préparation du vol, ou celui transmis par le contrôle aérien.
1.3.8 Effet du vent sur la vitesse
Comme pour la direction, le vent influe sur la vitesse. Une composante de vent arrière (HD) ou de face (TL) peut significativement augmenter ou altérer notre vitesse. Pour rappel, retenons :
- Pas de vent : TAS=GS
- Vent arrière : GS > TAS (on va + vite)
- Vent de face : GS < TAS (on va - vite)
L’estimation d’une vitesse sol convenable est indispensable en termes de planification du vol car elle permet entre autres de déterminer le temps de vol, et donc le carburant nécessaire.
En vol, le GPS affiche en permanence la vitesse sol (GS). En son absence, l’emploi de la règle des Deux tiers permet de l’estimer mais cette fois en inversant les valeurs :
- 1/3 > 3/3
- 2/3 = 2/3
- 3/3> 1/3
Exemple (Cf schéma en 1.3.7)
Nous volons à une TAS de 150 kt et le vent est toujours du 010°/30 kt. Quel est notre vitesse sol (GS) ?
- HD = 1/3 de 30 kt = 10 kt
- GS= 150 + 10 = 160 kt
Notre vitesse sol est donc de 160 kt.
2.Aides à la radio navigation
2.1 ADF/NDB
Il s’agit du moyen de radionavigation le plus ancien encore en service. Il est au préalable fondamental de bien faire la distinction entre ADF et NDB :
L’ADF (Automatic Direction Finder), appelé également Radiocompas, est l’instrument récepteur installé à bord de l’appareil.
Le NDB (Non-directional Beacon) est la balise émettrice au sol.

Un NDB tel qu’il est représenté par la symbologie des cartes Jeppesen. Il est désigné par un indicatif à 2 lettres, ici « GU » (Brest Guipavas) et émet sur la fréquence 338KHz. Les petites barres correspondent au code morse qui permet de l’identifier avec la radio.
2.1.1 Principe
Le NDB est un émetteur radioélectrique non directionnel c’est-à-dire qui diffuse un signal dans toutes les directions et avec la même puissance, avec une fréquence d’émission comprise entre 190 et 1750 kHz (moyenne fréquence).
La portée est variable selon le type de balise :
NDB standard : 25 à 75 nm
Locator (approche finale) : 10 à 25 nm
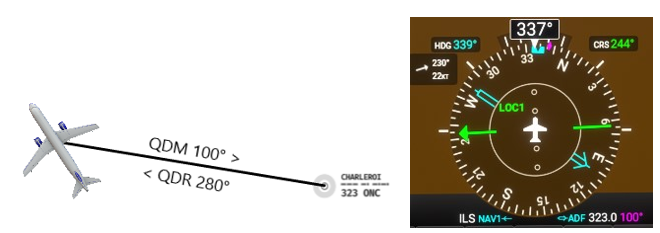
La détection du signal fonctionne sur le principe de la radiogoniométrie, c’est-à-dire en déterminant la direction d’arrivée de l’onde électromagnétique. On parle alors de Relèvement magnétique (Bearing), qui est lui-même divisé en 2 types :
QDM : Bearing en rapprochement vers station (TO)
QDR : Bearing en éloignement de la station (FROM)
Gisement (Relative Bearing) : Angle entre l’axe de l’avion et la direction vers la station.
Le NDB a pour avantage une relative simplicité d’utilisation et une présence encore significative dans des endroits reculés où VOR et ILS ne sont pas disponibles. En revanche, il comporte un certain nombre de désavantages affectant la fiabilité du signal :
- Précision moyenne
- Effet de nuit
- Effet du relief
- Effet des orages
2.1.2 Instrument
L’ADF classique se présente sous la forme d’une rose des caps pourvu d’une aiguille directionnelle pointant en permanence vers la station. Précisons que contrairement à un HSI/DG, l’instrument n’est pas alimenté par un gyroscope, ce qui signifie qu’il faut aligner le cap (HDG) manuellement avec l’avion de déterminer le gisement.
Dans des cockpits plus complexes, l’ADF est intégré à un autre instrument : le RMI (Radio Magnetic Indicator). A contrario de l’ADF classique, il indique automatiquement et constamment le cap (HDG) de l’avion. De plus, le RMI contient également l’aiguille du VOR.


Un récepteur ADF traditionnel et son boitier de sélection de fréquence.


Sur le G1000, L’aiguille de l’ADF (en bleue) est intégré au HSI. La fréquence ADF se sélectionne depuis un menu situé sur le PFD.
2.2 VOR
Le VOR est la balise de navigation radioélectrique la plus commune sur laquelle les procédures conventionnelles sont basées. Postérieure au NDB, elle est fréquemment associée à un DME (Distance Measuring Equipment).
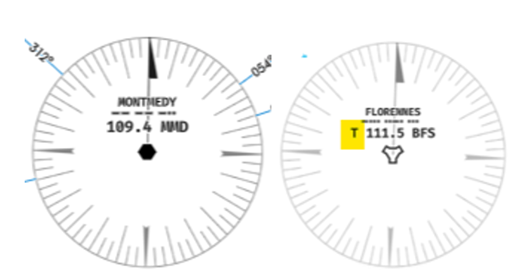
A gauche, un VOR classique. L’indicatif est composé de 3 lettres. Le VOR MMD est disponible sur la fréquence 109.4MHz. Comme pour un NDB, il peut être identifié par le pilote en écoutant son code morse.
A droite, le TACAN BFS situé près du terrain militaire de Florennes, reconnaissable grâce à son symbole spécifique et à la lettre « T » avant la fréquence.
2.2.1 Principe
La balise VOR émet sur la gamme des très hautes fréquences (VHF) de 108.00 à 117.95 MHz. On rencontre 3 types de VOR :
VOR en-route : utilisé pour suivre les routes aériennes avec une portée de 200 nm environ.
VOR terminal : situé à proximité des aérodromes et associé aux départs et approches aux instruments avec une portée d’environ 50 nm.
VORTAC : un VOR associé avec une balise militaire TACAN (Tactical Air Navigation System).
Le VOR est matérialisé avec 360 rayons partant de la balise appelés Radiales. L’angle entre l’avion et une radiale permet de déterminer le relèvement magnétique par rapport à la station.
On se rapproche ou s’éloigne de la station en suivant une route en éloignement (Outbound): le QDR ou en rapprochement (Inbound) : le QDM.
Par rapport à un ADF, le VOR jouit d’une meilleure précision et peut fournir des informations de distance (quand il est couplé à un DME).
En revanche, les installations au sol sont plus onéreuses à mettre en œuvre et l’erreur due au relief est toujours d’application.
2.2.2 Instrument
Le récepteur VOR permet de déterminer la radiale sur laquelle se trouve l’avion et par conséquent de la suivre en éloignement ou en rapprochement de la balise, matérialisé par une indication TO/FROM (et/ou une flèche). En fonction de l’équipement de l’avion, la réception du VOR peut se retrouver dans différents types d’instruments :
CDI (Course Déviation Indicator) : Encore fréquent sur les avions approuvés IFR les plus basiques et consistant en une barre de déviation verticale dans une rose des caps.
HSI : Le plus répandue et couplé avec l’indicateur de cap (HDG).
RMI : En complément du récepteur principal et couplé au récepteur ADF. Comme ce dernier, il se contente de pointer vers la station.

Sur le CDI, la molette OBS se tourne jusqu’à afficher la radiale désirée (Course). Le triangle indique soit TO ou FROM selon que la direction nous rapproche ou nous éloigne de la station.

Plus efficace pour naviguer, le HSI affiche le cap en parallèle de la radiale VOR, réglable avec la molette de droite (Course, ici matérialisée par une flèche jaune).

L’avantage du HSI digital est qu’il est possible d’ajouter une multitude d’information (RMI, DME, vent, etc…) pour une meilleur représentation de la situation.

La fréquence du VOR se selectionne dans la partie NAV (à droite) de la boite de commande. Dans cet exemple, la fréquence 110.50 est active alors que 114.90 est en attente. La partie COMM (à gauche) concerne les radio de commuincations.

Suivant le même principe, le menu de sélection des fréquences de radionavigations sur le G1000.
2.3 DME
Le DME (Distance Measuring Equipment) permet de connaitre la distance entre l’avion et l’émetteur au sol et est indispensable à l’exécution de nombres de procédures aux instruments.

Le « D » devant la fréquence signifie que le VOR est couplé avec un DME. On parle alors de VOR DME.

Lorsqu’un ILS est associé à un DME, il devient alors un ILS DME.
2.3.1 Principe
La distance est connue en mesurant le temps mis par le signal radioélectrique pour parcourir l’aller-retour entre l’avion et la station. La fréquence d’émission est comprise dans la gamme UHF entre 962 et 1213 MHz.
Dans la grande majorité des cas, le DME est généralement lié à un VOR (ou un ILS ou un TACAN) dont la distance s’affiche automatiquement une fois la fréquence de ce dernier affiché. Par conséquent, la portée du DME correspond à celle de la balise en question.
2.1.1 Instrument
L’information principale délivrée par le DME est naturellement la distance vers la station au sol et est affichée en miles nautiques (nm).
Il existe principalement 2 types de récepteurs DME :
- Le boitier DME indépendant peut en plus d‘afficher la distance, calculer le temps de vol nécessaire pour rejoindre la station, ainsi que la vitesse sol (GS). Attention, ces données ne sont utilisables que si l’avion vol droit vers la station. Désormais obsolète, ce type de récepteur se retrouve principalement sur les avions anciens, particulièrement en complément d’un CDI.
- Le récepteur intégré est directement installé sur le récepteur VOR (HSI ou RMI) et offre au pilote une meilleure conscience de la situation.

En plus de la distance, le boitier DME indépendant affiche traditionnellement la vitesse sol (GS) et le temps nécessaire vers la station.

L’affichage du DME est ici affiché sur l’écran du GPS Garmin.

En plus de pointer vers le VOR, le RMI contient un DME pour chacun des 2 radios VOR.

Sur un HSI, le DME fait partie des informations intégrées à l’affichage.
2.4 ILS
L’ILS (Instrument Landing System) sont encore à ce jour le moyen de radionavigation le plus performant utilisé pour l’approche et l’atterrissage.
2.4.1 Principe
L’avion est guidé sur le plan horizontal et vertical vers la piste lors de l’approche finale par 2 signaux radio électriques distincts :
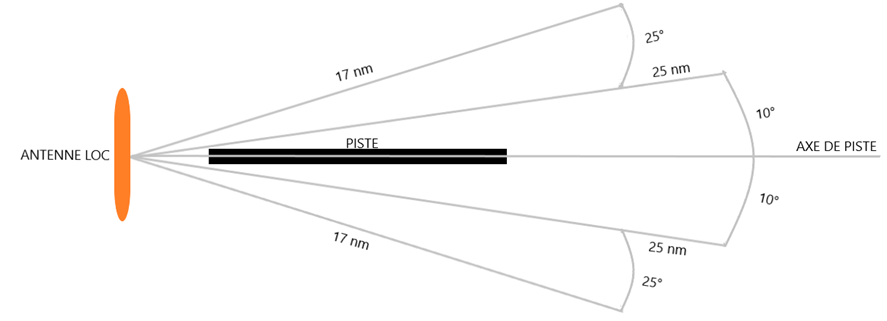
- Le Radiophare d’alignement de piste ou Localizer (LOC) constitue le guidage horizontal, c’est-à-dire la direction vers la piste grâce à une série d’antenne installée dans l’axe de piste. Il émet en VHF entre 108.00 et 111.95 MHz et est utilisable dans un arc de 35° de part et d’autres de l’axe d’approche, avec une portée approximative de 25 nm.
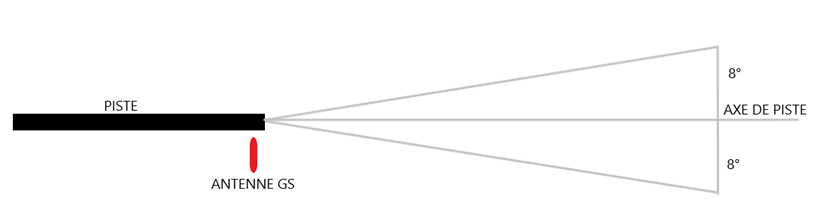
- Le Plan de descente ou Glide Path (GP) ou Glide Slope (G/S) donne le guidage vertical dans le plan d’approche. Bien qu’émettant en UHF, le signal s’affiche de concert avec le LOC lorsqu’on sélectionne la fréquence de celui-ci. La pente (FPA) est généralement de 3° mais peux varier d’une approche à l’autre. Le signal est émis par des antennes situées à hauteur du point d’atterrissages (Touchdown Zone) et couvre un arc de 8° autour de l’axe d’approche sur une distance 10 nm.
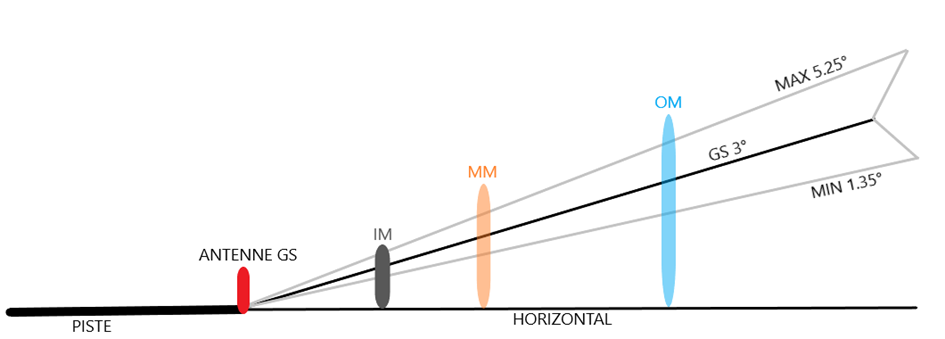
Les Radiobornes ou Markers : Ce sont des balises installées au sol le long de la trajectoire de l’ILS. Elles émettent un faisceau vertical qui déclenche une tonalité et un signal lumineux dans le cockpit lors du passage à la verticale. Il existe 3 types de balises en fonction de la distance de la piste :
- Balise extérieure Outer Marker (OM): 4 à 7 nm
- Balise médiane – Medium Marker (MM) : 0.5 à 0.8 nm
- Balise Intérieure – Inner Marker (IM) : seuil de piste
Leur utilité est de donner une information de distance tout en contrevérifiant l’altitude sur le plan de descente à l'instant T. Avec la généralisation du DME, les radiobornes sont devenues obsolètes et ont majoritairement disparues des procédures d’approches. Celles subsistant à l’heure actuelle sont généralement des OM, les MM et IM demeurant dans des proportions infimes.

Dans le cas d’un CDI qui affiche un ILS, la barre centrale du VOR (VLOC) devient alors celle du LOC. Le GS correspond à la barre horizontale.

A gauche de l’instrument, l’affichage du plan de descente est constitue d’une echelle et d’un pointeur (ici un triangle jaune) representant le GS. Comme pour le CDI, le LOC a pris la place de la radiale VOR.

Le GS est parfois situé en face de l’Horizon artificiel (AI), comme dans le cas du G1000 (l’échelle est dans ce cas à droite).
3.Navigation
3.1 Navigation VOR
Dans le cadre de cette leçon, nous nous concentrerons exclusivement sur la navigation avec le HSI comme instrument principal, appuyé éventuellement par le RMI. En effet, l’immense majorité des avions équipés pour le vol aux instruments en est équipé, qu’il s’agisse d’une instrumentation analogique classique ou de glass cockpit.
3.1.1 Position
Pour connaitre sa position par rapport à une balise VOR sélectionnée, il suffit de tourner la molette CRS jusqu’à ce que l’aiguille soit centrée. On peut alors lire sur quelle radiale nous nous trouvons à cet instant.
Remarque : Sur le HSI, la queue de l’aiguille indique en permanence la radiale actuelle.
Maintenant, interprétons la situation selon que l’on veuille se rapprocher ou s’éloigner de la station :
- INBOUND : On tourne la molette Course (CRS) jusqu’à ce que l’aiguille soit centrée ET que la flèche verte pointant vers la station soient affichés. La radiale actuelle correspond à la queue de l’aiguille.

- OUTBOUND : On tourne la molette Course (CRS) jusqu’à ce que l’aiguille soit centrée ET que la flèche pointant vers l’opposé de la station. La radiale actuelle correspond à la pointe de l’aiguille.

3.1.2 QDM/QDR
En considérant le situation exposé dans chapitre 2.5.1, reprenons les 2 cas de figures.
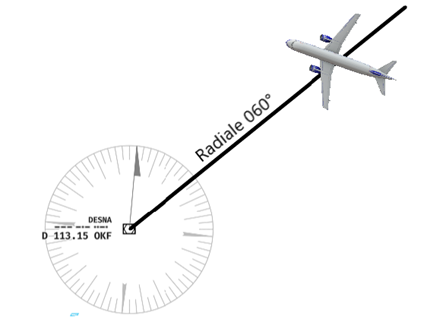
- QDM : Pour voler sur la radiale 60° en rapprochement, nous devons alors tourner dans la direction dans laquelle point l’aiguille, à savoir un cap (HDG) 240°. On se dirige alors vers le VOR sur un QDM 240, ou radiale 60° INDBOUND.

- QDR : Pour voler sur la même radiale 60° en éloignement, on tourne vers le cap 60°. On s’éloigne du VOR sur un QDR 060° ou radiale 60° OUTBOUND.

3.1.3 Interception de radiale
Dans cette partie, nous allons voir comment intercepter une radiale VOR prédéterminée comme c’est le cas dans les procédures IFR. Afin d’exécuter ceci, il est primordiale de déterminer un cap d’interception adéquat en fonction de sa position actuelle et de la radiale à intercepter.
Le cap d’interception doit permettre de remettre de rejoindre la radiale avec un angle suffisant : l’attaque. Il n’y a pas de règle imposée, si ce n’est que l’attaque est généralement comprise entre 20° et 90°.
Cependant, pour avoir une idée précise d’un cap d’interception approprié, nous pouvons nous remettre à la formule suivante :
Attaque° = (Radiale actuelle – Radiale désirée) x 2
En résumé, plus il l’écart entre la radiale actuelle et la radiale désirée est grande, plus l’attaque nécessaire sera grande, sans toutefois excéder 90°.
- INBOUND : Sur un cap 089°, la queue de l’aiguille du RMI (en bleu) nous indique que nous nous trouvons actuellement sur la radiale 350°. On souhaite intercepter la radiale 300° INBOUND pour rejoindre le VOR de Desna (OKF – 113.15).
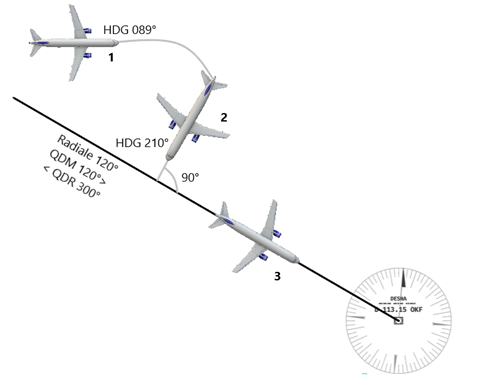
1. On sélectionne la radiale désirée avec la molette CRS, ici la radiale 300° INBOUND, ce qui correspond à un QDM 120°. On constate que la radiale se trouve à notre droite.

2. Pour intercepter la radiale , nous allons prendre un cap d’interception correspondant à une attaque de 90° vers la radiale.

3. Quand l’aiguille commence à se rapprocher du centre, on tourne vers la gauche au QDM 120° sans dépasser le taux de virage standard. On suit alors la radiale à convenance.

- OUTBOUND : Sur un cap 330°, la queue de l’aiguille du RMI (en bleu) nous indique que nous nous trouvons actuellement sur la radiale 330°. On souhaite intercepter la radiale 350° OUTBOUND depuis le VOR de Desna (OKF – 113.15).
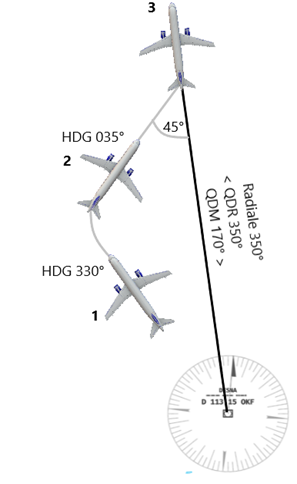
- On sélectionne la radiale désirée avec la molette CRS, ici la radiale 350° OUTBOUND, ce qui correspond à un QDR 350°. On constate que la radiale se trouve à notre droite.

2. Pour intercepter la radiale , nous allons prendre un cap d’interception correspondant à une attaque de 45° vers la radiale.

3 Quand l’aiguille commence à se rapprocher du centre, on tourne vers la gauche au QDR 350° sans dépasser le taux de virage standard. On suit alors la radiale à convenance.

3.1.4 Passage à la verticale
Le passage à la verticale d’un balise VOR se manifeste par plusieurs indications :
- La distance (quand un DME est disponible). Attention, la distance affichée sur le DME est la distance oblique (Slant Range Distance) entre l’avion et la station, c’est-à-dire tenant compte de la distance au sol ET de hauteur (AGL).
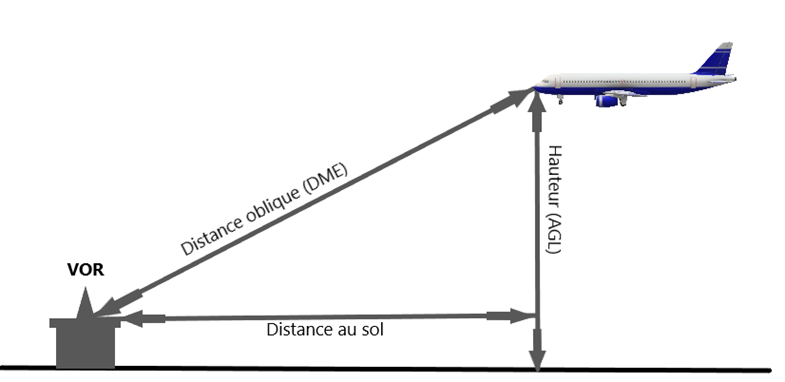
Sachant que 6000 ft = 1 nm, la distance affichée sur la distance affichée sur le DME verticale en fonction de la hauteur sera la suivante :
L’aiguille du RMI bascule de 180° vers l’arrière.
- L’indication TO/FROM (où la flèche) de l’instrument passe de TO à FROM, confirmant que nous sommes bien passé de la phase de rapprochement (INBOUND) à celle d’éloignement (OUTBOUND).
Après le passage à la verticale de la station, pour intercepter une radiale en éloignent (OUTBOUND), une attaque de 30° est nécessaire.
3.1.1 Effets du vent
Pendant l’interception d’une radiale, le cap d’interception doit être corrigé pour le vent actuel.
- Sans GPS : Afin de ne pas s’embarrasser de calcul complexe pendant le vol, on prendra par convention une correction de +/- 10° en fonction de la direction du vent si le vent n’est pas supérieur à 30 kt. Au-delà de 30kt, il es nécessaire d’augmenter la correction.
- Avec un GPS : Il suffit de corriger le cap (HDG) pour suivre la route vraie (TRK) désirée.
Pour suivre la radiale, on corrige le cap (HDG) pour compenser le vent traversier (X-Wind) tel que nous l’avons vu en 1.1.4.
3.2 Navigation ADF
Sur le G1000, le RMI est directement intégré au HSI. Il est possible d’afficher l’ADF sur l’une des 2 aiguilles. Comme traditionnellement l’ADF est représenté par une double aiguille, nous allons utiliser de préférence celle-ci (BRG 2) pour naviguer.
3.1.1 Position
L’aiguille de l’instrument (ici la double aiguille bleue) pointe en permanence vers la balise NDB. La queue de l’aiguille indique sur quel QDM nous nous trouvons ; à l’inverse, la flèche montre le QDR.
3.1.1 Interception
Comme pour l’interception d’une radiale VOR, l’interception d’un relèvement (Bearing) depuis/vers un NDB nécessite l’emploi d’un cap d’interception. Celle-ci sera de maximum 90° et peut être estimée avec le calcul suivant :
Attaque° = (QDM actuelle – QDM désirée) x 5
Dans le cas d’un passage à la verticale du NDB, l’interception du QDR se fait en principe avec une attaque de 30°.
- INBOUND : Sur un cap 337°, nous souhaitons rejoindre le NDB de Charleroi (ONC – 323 kHz) sur un QDM 120°.
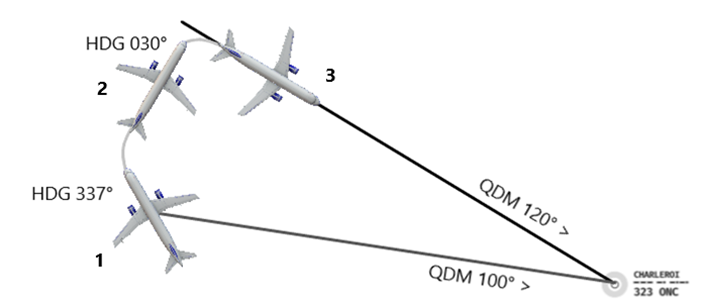
1. Actuellement sur un QDM 100°, on constate que le QDM 120° que nous recherchons se trouve 20° à la droite de notre QDM actuelle.

2. Nous tournons à droite de façon à avoir une attaque de 90° vers la QDM 120°.

3. Une fois que la flèche de l’aiguille de l’ADF s’approche de 120°, nous virons à droite pour rejoindre et suivre le QDM 120°.

- OUTBOUND : Après le passage à la verticale de la balise, nous souhaitons nous en éloigner en suivant un QDR 150°.
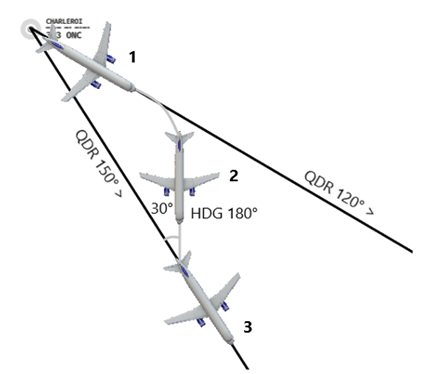
1. En s’éloignant du NDB, le QDM 120° devient le QDR 300°. Depuis cette position, le QDR 150° se trouve donc à 50° sur notre droite.

2. Nous prenons un cap 180° pour « attaquer » avec un angle de 30°.

3. Quand l’aiguille de l’ADF s’approche des 150°, on vire à gauche pour intercepter et suivre le QDR 150°.

3.2.3 Effets du vent
Pendant l’interception d’un QDM/QDR, les corrections pour le vent sont identiques à celle appliquée pour l’interception d’une radiale VOR (Cf. 3.1.5).
4.Procédures
4.1 Circuit d’attente – Holding Pattern
Le circuit d’attente, communément appelé Holding est une procédure en vol visant à faire patienter un avion autour d’un point fixe (VOR, ADF, Waypoints, etc…).
Le Holding est généralement imposé par le control aérien au pendant la descente ou l’approche pour raison de traffic, mais est parfois du chef du pilote (pour attendre une amélioration de la météo par exemple), ou peut encore être imposé lors d’une procédure d’approche ou de remise de gaz.
4.1.1 Principe
Il se présente sous la forme d’un hippodrome dont la trajectoire consiste à s’éloigner pendant un temps ou une distance donnée d’une balise puis de revenir parallèlement sur un cap publié vers cette dernière :
- STANDARD (par la droite)
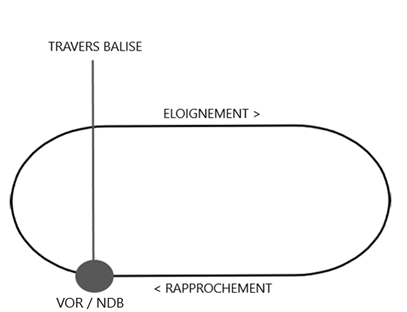
- NON-STANDARD (par la gauche)
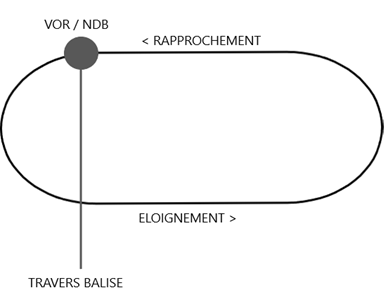
Le temps d’éloignement est par défaut d’1 minute, sauf autre indication de temps ou de distance DME.
Le vitesse maximale dans un circuit d’attente est définie par le document ICAO Doc 8168 Vol 1 :

L’altitude est soit imposée par le contrôleur, soit publiée:

4.1.2 Entrées
En fonction du secteur d’arrivée vers la station, 3 types d’entrée sont possibles pour rejoindre un circuit d’attente. Voici le schéma s’appliquant à un circuit Standard :
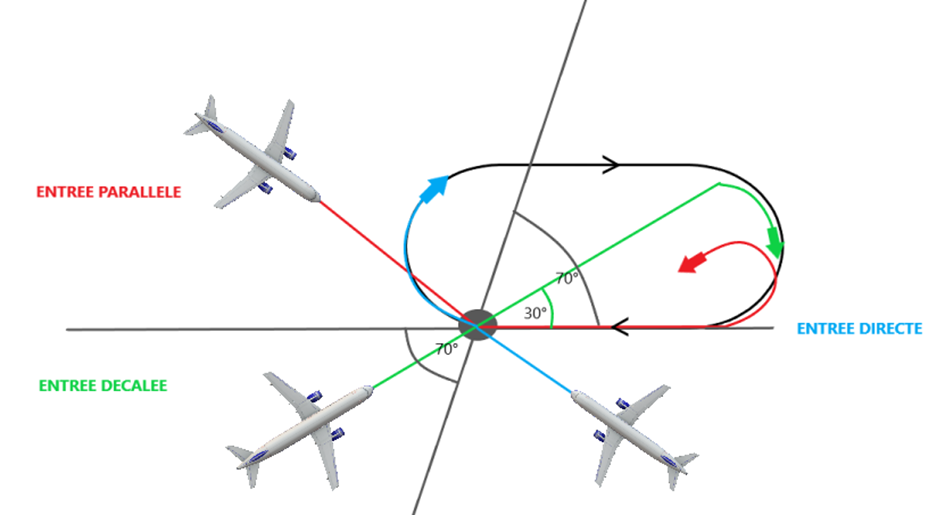
- Entrée Parallèle (Parallel Entry) : Après avoir atteint la station, on prend le cap d’éloignement (Outbound) pendant 1 mn puis on tourne pour revenir à la station et ensuite entrer dans le circuit d’attente.
- Entrée Décalée (Offset/Teardrop Entry) : Après avoir atteint la station, on prend un cap de 30° de l’éloignement (Outbound) à l’intérieur du circuit pendant 1 mn puis on tourne pour revenir à la station et ensuite entrer dans le circuit d’attente.
- Entrée Directe (Direct Entry) : Après avoir atteint la station, on tourne pour entrer dans le circuit d’attente.
4.1.3 Effet du vent
Afin de corriger les effets du vent, il est nécessaire d’appliquer les techniques de correction suivante :
- Vent de face/arrière : +/-1 seconde pendant l’éloignement (Outbound) par kt de composante de vent.
- Vent traversier : Si disponible, suivre le Track (TRK) avec le GPS. DOUBLER la correction sur l’Outbound pendant la première minute, puis revenir à une correction standard jusqu’à la fin de l’éloignement.
Ceci est nécessaire afin d’éviter d’être trop « poussé » ou au contraire « freiné » par le vent au moment de rejoindre la branche de rapprochement.
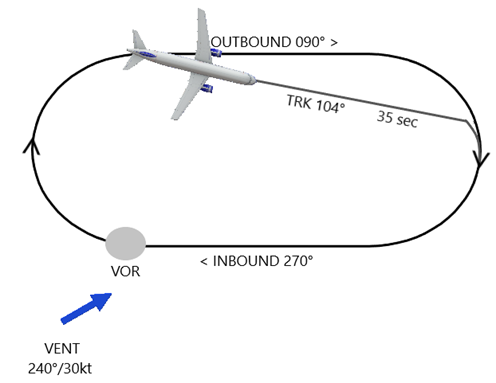
Exemple :
Nous devons rentrer dans le circuit d’attente standard vers le VOR avec un rapprochement (Inbound) de 270°.
Notre vitesse vraie (TAS) est de 120 kt.
Le vent estimé est de 240° pour 30 kt.
Une fois la station passée, nous tournons vers la droite pour suivre un éloignement de 90°. En nous basant sur les informations du GPS, nous allons corriger le temps et la route (TRK) d’éloignement :
- Un vitesse sol (GS) de 145 kt, donc 25 kt de vent arrière. Nous devons retrancher 145-120= 25 secondes en moins au temps d’éloignement d’1 mn, soit 35 secondes.
- Un cap (HDG) 97°, donc 7° de correction. Nous devons doubler la correction au vent, 7 X 2= 14°, donc suivre une route (TRK) 104°.
4.2 Virages de procédures – Reversal Procedure
Les procédures aux instruments publiées, principalement les procédures d’approches, contiennent différents types de virage qu’il convient d’exécuter selon des méthodes définies.
4.2.2 Virage conventionnel 45°/180° - Procedure Turn 45°/180°
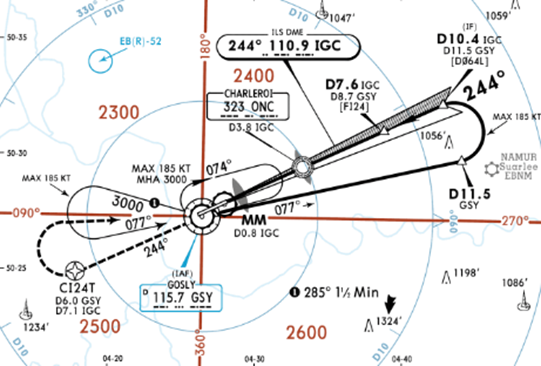
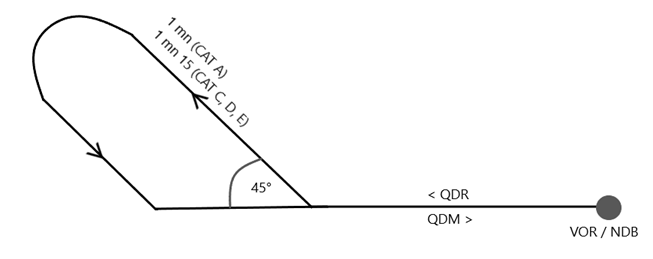
Sur un QDR, au passage du repère publié, on tourne de 45° pendant 1 mn avant de virer de 180° pour intercepter le QDM.
4.2.3 Virage conventionnel 80°/260° - Procedure Turn 80°/260°
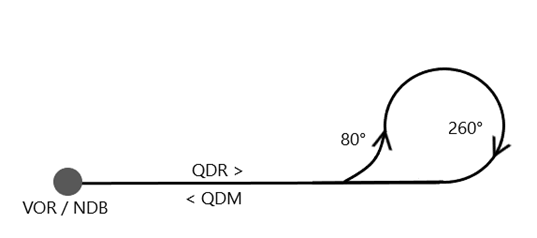
Sur un QDR, au passage du repère publié, on tourne de 80° puis de 260° dans le sens opposé pour intercepter le QDM.
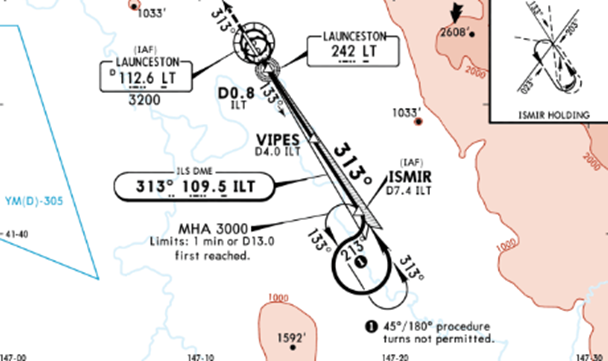
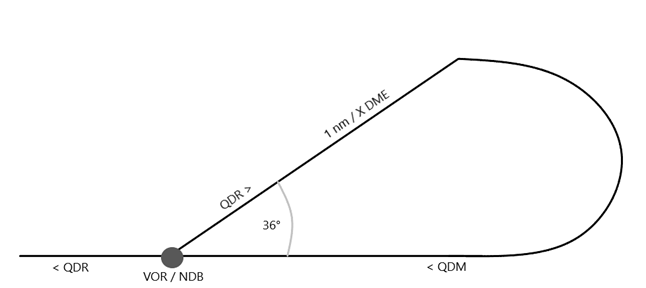
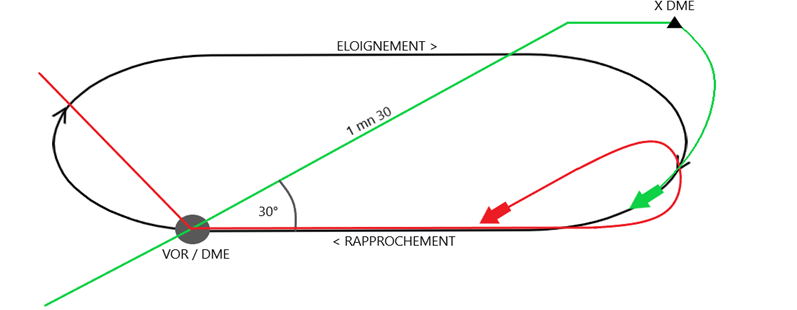
4.2.4 Hippodrome - Racetrack
Très similaire à un circuite d’attente classique, il y a cependant quelques nuances en fonction du type d’entrée :
- Teardrop/Offset: Après le passage à la verticale de la station, on tourne de 30° pendant 1 mn 30 sec maximum avant de voler en éloignement parallèlement au QDR jusqu’à la distance DME prescrite. On tourne ensuite pour intercepter le QDM.
- Parallèle: Après le passage à la verticale de la station, on retourne vers celle-ci en interceptant le QDM.
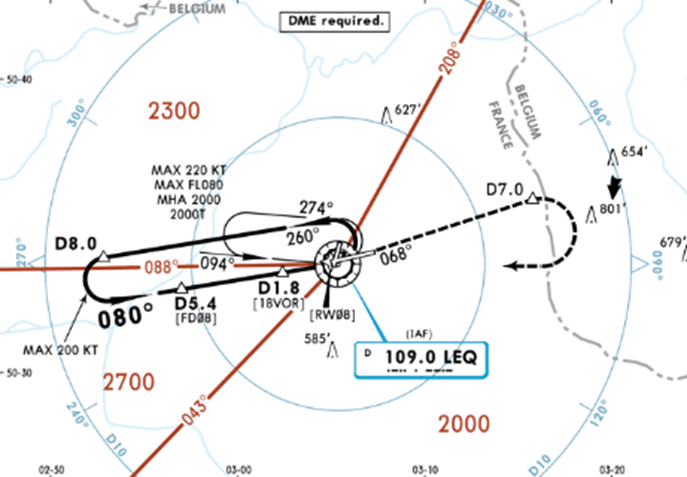
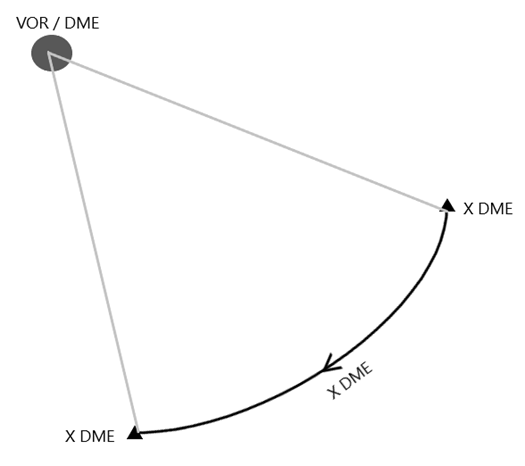
4.3 Arc DME
Cette procédure impose de voler autour d’une balise à distance constate, généralement avant l’interception de la trajectoire d’approche finale. Le DME de référence peut être celui d’un VOR ou d’un ILS selon la procédure publiée.
Avant de suivre l’Arc DME, nous devons calculer une distance d’anticipation depuis la balise à laquelle il faudra commencer à tourner (au taux de virage standard) :
Distance ARC DME + (TAS/200)
L’objectif étant de garder une distance DME constante, la technique consiste à tourner de façon à garder l’aiguille de RMI à 90° de notre cap actuel. En pratique, on tourne de 10° toutes les 10° de radiales traversées jusqu’à la sortie.
Exemple :
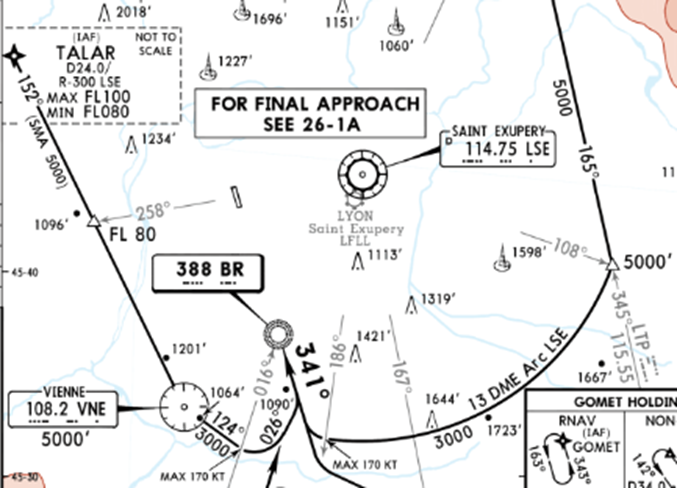
Pour intercepter l’ARC DME situé à 13 nm du VOR de Saint Exupéry à une vitesse vraie de 120 kt (TAS), après le passage de la radiale 108°, nous devons commencer à tourner à: 13 + (120/200) = 13.6
Nous devons donc commencer à tourner pour suivre l’ARC DME quand notre DME indique 13.6 nm.
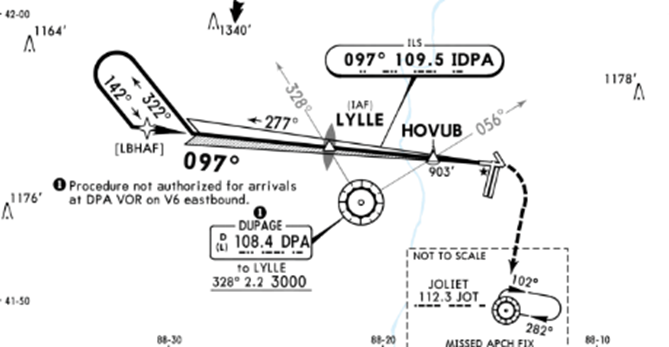
La carte d’approche indique que nous devons sortir de l’ARC DME au passage de ma radiale 186°, et ainsi continuer sur le QDM 341° vers le NDB BR.
5.Approche
Nous l’avons vu dans la partie 2, l’approche, qui est la phase finale du vol menant vers la piste utilise des moyens de radionavigation au sol (VOR, NDB ? ILS). On parle alors d’approches conventionnelles.
Depuis une époque plus récente, il existe en parallèle les approches PBN, plus commencement appelées approches RNAV (GNSS). Nous n’aborderons pas ces dernières dans ce cours car elles font l’objet d’un cours spécifique que nous avons antérieurement publié.
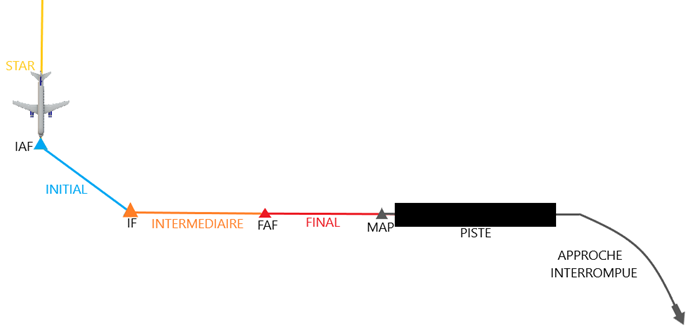
5.1 Segments
L’approche se décompose en 5 parties distinctes appelées « segments » délimités entre eux par des points dont la Marge de Franchissement d’Obstacle (MOCA – Minimum Obstacle Clearance Altitude) varie :
STAR (Standard Arrival Route) : La procédure joignant la partie En-route à la procédure d’approche.
- MOCA : 1000 ft
- IAF : Initial Approach Fix
Initiale : Le début de la procédure menant à l’approche sélectionnée.
- MOCA : 1000 ft
- IF : Initial Fix
Intermédiaire (Intermediate) : La dernière branche avant l’approche finale.
- MOCA : 500 ft
- FAF/FAP : Final Approach Fix / Point
Finale : La trajectoire finale en descente jusqu’à la piste (ILS par exemple).
- MAP : Missed Approach Point
Approche interrompue (Missed Approach) : La procédure publiée à suivre en cas de remise de gaz pendant l’approche finale.
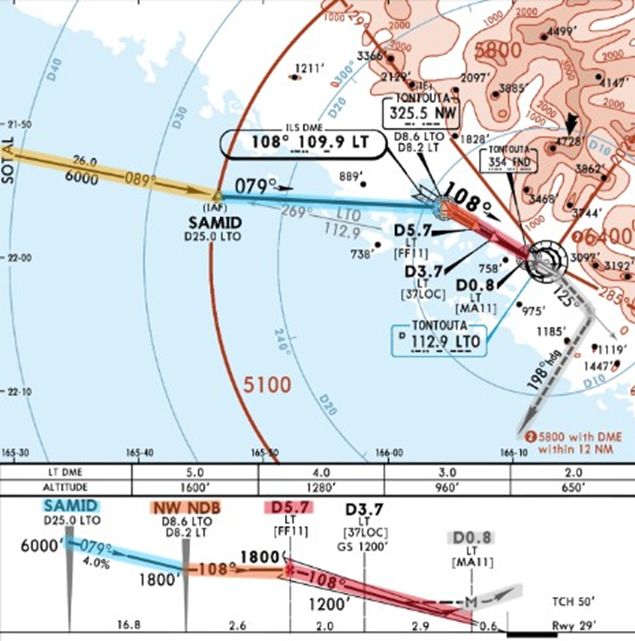
Exemple :
Les segments d’approche de l’ILS Y 11 de Nouméa (NWWW) se décomposent de la façon suivante :
- STARS depuis SOTAL en descente vers 6000ft.
- Approche Initial depuis SAMID (IAF) en descente vers 1800 ft
- Approche Intermédiaire depuis NW (IF) à 1800 ft.
- Approche Finale depuis D5.7 où on intercepte le G/S.
- Approche Interrompue depuis D0.8 (MAP)
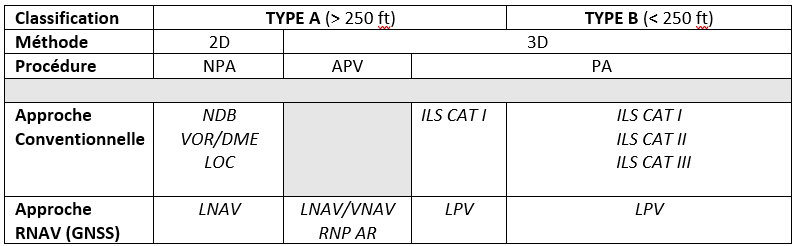
5.2 Classification
La dernière réglementation de l’OACI définit les approches en 2 types en fonction de la hauteur de décision (DH) :
Type A ( > 250 ft)
Type B ( < 250 ft)
Parallèlement, elles sont aussi définies selon la méthode d’approche :
2D - guidage latéral
3D - guidage latéral et vertical
Les différentes procédures d’approche sont ainsi classées :
NPA - Approche de non-précision (Non Precision Approach)
APV - Approche avec guidage vertical (Approach with Vertical Guidance)
PA - Approche de précision (Precision Approach)
5.3 Minimas & Catégories
5.3.1 Minimas
Chaque approche publiée spécifie jusqu’à quelle altitude ou hauteur le pilote peut descendre sans voir la piste : ce sont les minimas d’approche (Minimums). Sans visibilité sur les installations, il est contraint d’interrompre l’approche.
Différents types de minimas s’appliquent en fonction du type de procédure :
MDA - Altitude minimum décision (Minimum Decision Altitude)
DA - Altitude de décision (Decision Altitude)
DH - Hauteur de décision (Decision Height)
CFDA - Approche finale en descente continue (Continuous Descent Final Approach)

En parallèle de l’altitude/hauteur de décision, les approches imposent des visibilités minimale pour être autorisé à commencer l’approche.
5.3.2 Visibilité / RVR
En parallèle de l’altitude/hauteur de décision, des visibilités minimales sont également instaurées pour être autorisé à commencer l’approche. On retrouve deux notions proches mais distinctes pour mesurer la visibilité :
- VIS - Visibilité (Visibility) : La distance depuis laquelle il est possible de distinguer un objet non éclairé. Elle peut être soir horizontale soit verticale.
- RVR - Portée visuelle de piste (Runway Visual Range) : La distance depuis laquelle le pilote peut apercevoir les installations de la piste (balisage de piste ou lampes d’approche). La RVR lorsqu’elle est disponible permet donc généralement d’avoir des minimas plus avantageux qu’avec une simple indication de visibilité.
Par convention, on peut estimer la RVR en fonction de la visibilité selon la table de conversion ci-dessous :

5.3.3 Catégories d’approche
Les minimas d’approches dépendent également de la catégorie d’aéronef. Celle-ci est définie par la vitesse d’approche au seuil de piste (Vat) dans les conditions suivantes : vitesse de décrochage X 1.3 à la masse maximale d’atterrissage.
Vat= Vs X 1.3 à MLM
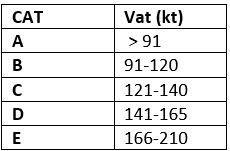
Exemple :
Dans la partie concernant les minimas, ceux-ci sont indiqués en fonction du type de procédure et de la catégorie d’aéronef :
- Approche LPV : les avions de catégories A et B ont une DA de 858 ft et de 868 ft pour ceux de la catégorie C.
- L’approche LNAV/VNAV : Les minimas sont de 968 ft (A), 978 ft (B) et 988 ft (C).
- LNAV : Aucun catégorie n’est spécifiée, ce qui signifie que la MDA de 1180ft d’applique à toutes les catégories d’aéronefs.
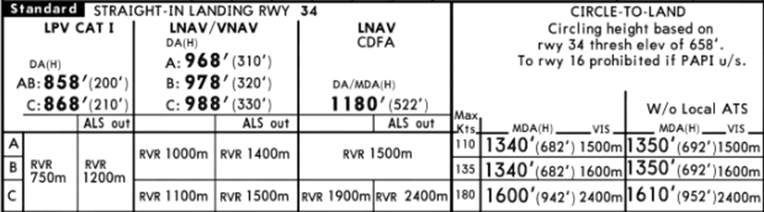
Les RVR sont aussi publiées selon la catégorie d’aéronef, mais aussi selon la disponibilité de certains moyens d’approche. Par exemple pour une approche LPV, la RVR est réduite de 750 à 1200 m si les lampes d’approches (ALS - Approach Lightning System) sont hors service.
- Circle to Land : Pour la catégorie A, la MDA est de 1340 ft et la visibilité minimale de 1500m. La MDA augmente à 1350 ft si aucun service de contrôle aérien (ATS - Air Traffic Service) n’est disponible, etc…
5.3.4 Approach Ban
Selon la réglementation, il est interdit de continuer une approche aux instruments au-delà des points suivants si la dernière visibilité/RVR reportée est en dessous du minimum :
- PA : Du FAP ou balise extérieure (OM)
- NPA : En dessous de 1000 ft AGL
Si tel est le cas, le pilote doit interrompre l’approche sans même descendre jusqu’à l’altitude/hauteur de décision publiée.
5.4 Types deApproches
5.4.1 Approche de précision
L’ILS de catégorie I est la plus répandue et le standard parmi ce type de procédure d’approche. Il autorise la descente jusqu’à une DH de 200 ft sans visibilité avec une RVR/VIS de 550 m.
5.4.1.1 Préparation
Une fois la procédure d’approche attribuée par le contrôle aérien, il est nécessaire de faire un point dans un briefing qui doit contenir les éléments suivants :
Météo
NOTAM
Carburant : réserve + minimum diversion
Avion : Statut/limitations + Performances
Cartes d’approches : vérification et lecture des procédures d’approches adéquates (STARS + ILS + Aéroport) :
- Minimas (DA(H)/RVR/VIS
- Route :A approche + approche interrompue
- Moyens de radionavigation / Fréquences + course (CRS)
- MSA (Minimum Safe Altitude)
- Balisage de piste / lampes d’approche
- Taxiway de sortie
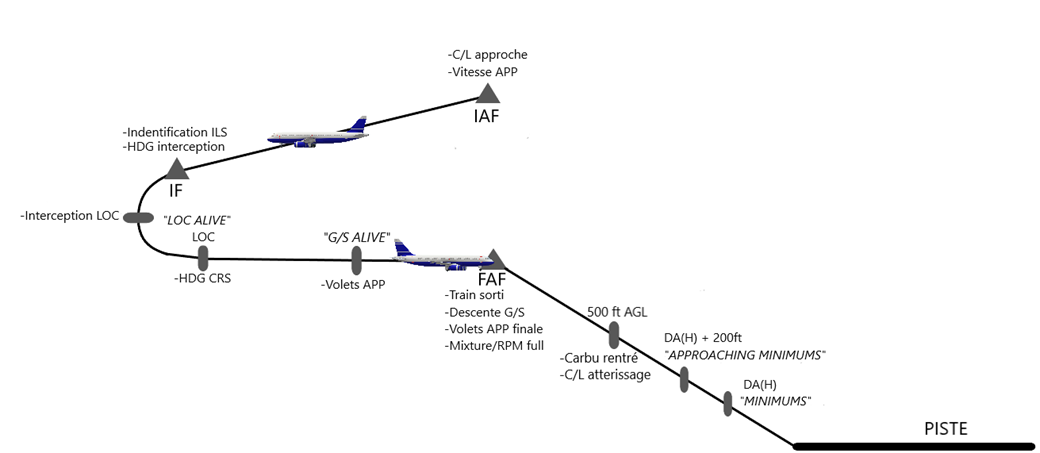
5.4.1.2 Exécution
-Au passage de l’IAF :
- Effectuer la checklist d’approche.
- Réduire la vitesse à 120 kts.
-Au passage de l’IF / cap d’interception vers le LOC :
- Vérifier la réception de l’ILS et confirmer l’identification.
- Régler le sélecteur de cap sur le cap d’interception.
-Quand l’aiguille du LOC est active :
- Annoncer « Localiser Alive ».
- Tourner pour l’intercepter le LOC.
-Etabli sur LOC :
- Régler le secteur de cap sur la trajectoire (CRS) de l’ILS.
-Quand le G/S est actif :
- Annoncer « Glide Alive ».
- Réduire la vitesse pour 1 cran de volet (en fonction du type d’avion).
Sur le G/S :
- Sortir le train d’atterrissage (si applicable).
- Descendre sur le plan.
- Réduire la vitesse pour la configuration d’atterrissage.
- Mixture / RPM full (si applicable).
-A 500 ft AGL :
- Réchauffage carburateur rentré (si applicable).
- Effectuer la checklist d’atterrissage.
-A 200 ft au-dessus de la DA(H) :
- Annoncer «Approaching Minimum».
-A la DA(H) :
- Si piste en vue, annoncer « Continue » et descendre visuellement jusqu’à la piste (en suivant le PAPI disponible).
- Si piste pas en vue, annoncer « Go Around, Flaps » et effectuer la procédure d’approche interrompue.
5.4.2 Approche de non-précision
Les approches de précision concernent les approches VOR/DME, NDB mais aussi LOC (y compris une approche ILS où le G/S ne serait pas disponible).
5.2.2.1 Préparation
Le briefing d’approche suit la même structure que pour une approche de non précision (Cf 5.4.1.1) mais comporte quels ajustements propres à ce type d’approche, notamment :
- MDA(H)
- Taux de descente en approche finale (Cf 1.3.6) : A calculer en fonction de la pente requise.
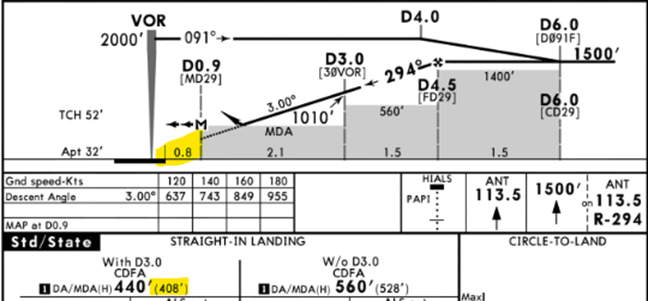
Exemple : Ci-dessous, la pente requise est de 3.32° depuis le FAF (à 7 nm du VOR) jusqu’au MAP (à 1.5 nm).
La tableau du bas offre une correspondance du taux de descente à suivre (V/S) en fonction de la vitesse sol (GS).
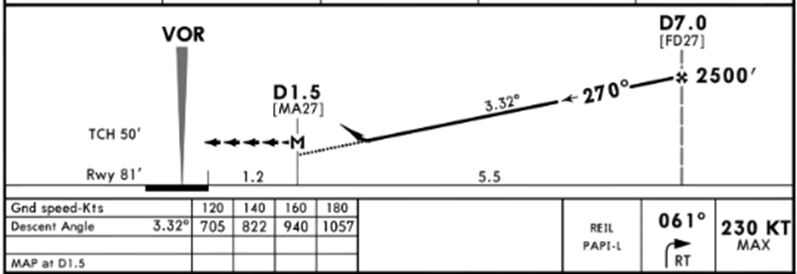
- Seuil décalé (Offset) : Il n’est pas rare que le QDM ne soit pas forcement aligné avec le QFU de la piste.
Exemple : A Nice LFMN), le LOC est décalée par rapport au seuil de piste 04R.

Le QFU de l’approche VOR est de 268° pour la piste 22L.
- Altimètre : Il est dans tous les cas indispensable d’afficher le QRH correct, qui plus est pour une approche de non précision puisque la référence pour descendre sur le plan d’approche finale est l’altitude.
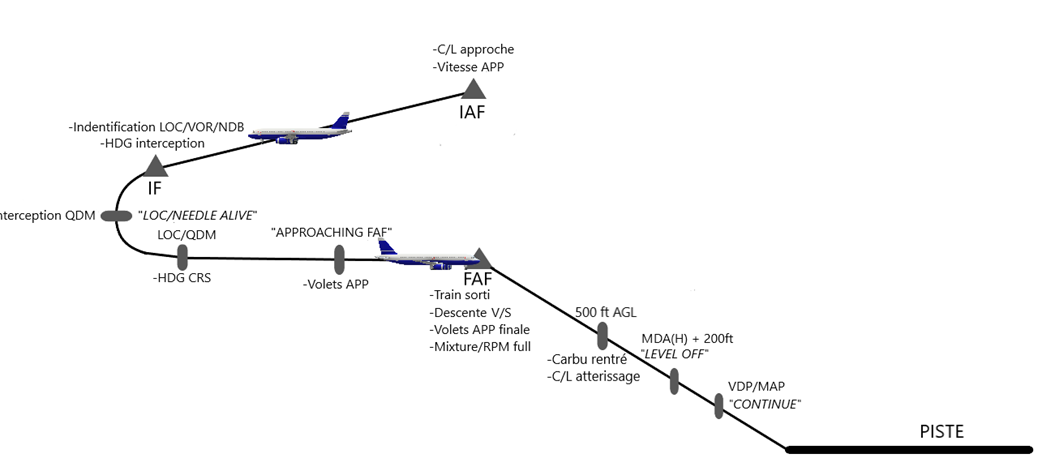
5.2.2.2 Exécution
-Au passage de l’IAF :
- Effectuer la checklist d’approche.
- Réduire la vitesse à 120 kts.
-Au passage de l’IF / cap d’interception vers le QDM :
- Vérifier la réception du VOR/NDB/LOC et confirmer l’identification.
- Régler le sélecteur de cap sur le cap d’interception.
-Quand l’aiguille du LOC est active :
- Annoncer « Localiser Alive ».
- Tourner pour l’intercepter le LOC.
OU
-Quand l’aiguille du VOR est à la moitié de l’échelle :
- Annoncer « Needle Alive ».
- Tourner pour l’intercepter le QDM.
OU
-Quand l’aiguille de l’ADF est à 5° :
- Annoncer « Approaching QDM ».
- Tourner pour l’intercepter le QDM.
-Etabli sur le QDM :
- Régler le secteur de cap sur la trajectoire (CRS) de l’ILS.
-A 1 nm du FAF :
- Annoncer « Approaching FAF ».
- Réduire la vitesse pour 1 cran de volet (en fonction du type d’avion).
-Sur plan de descente :
- Sortir le train d’atterrissage (si applicable).
- Descendre sur le plan au taux de descente (V/S) adéquat.
- Réduire la vitesse pour la configuration d’atterrissage.
- Mixture / RPM full (si applicable).
- Vérifier l’altitude recommandée en fonction de la distance.
-A 500 ft AGL :
- Réchauffage carburateur rentré (si applicable).
- Effectuer la checklist d’atterrissage.
-A 200 ft au-dessus de la MDA(H) :
- Annoncer «Level Off».
- Voler en palier jusqu’au VDP sans descendre en dessous de la MDA(H).
-Au VDP/MAP :
- Si piste en vue, annoncer « Continue » et descendre visuellement jusqu’à la piste (en suivant le PAPI disponible).
- Si piste pas en vue, annoncer « Go Around, Flaps » et effectuer la procédure d’approche interrompue.
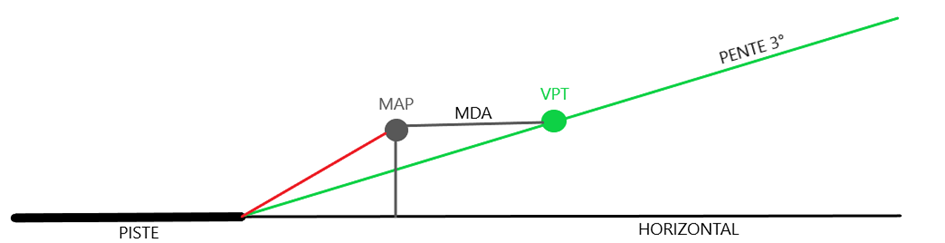
Remarque :
Il arrive sur certaines approches de précision que le passage du MAP à la MDA(H) oblige à une pente plus forte pour descendre visuellement jusqu’à la piste. Pour éviter cet inconvénient, il est judicieux de calculer un point de descente visuel en amont de la MDA(H) afin de garder un taux de descente standard de 3° jusqu’à la piste: il s’agit du VDP (Visual Descent Point).
Le VDP peut alors de substituer au MAP, ce qui signifie qu’une approche interrompue devra être effectuée si la piste n’est pas en vue au passage du VDP. Il peut être déterminé avec le calcul suivant :
VDP= (MDH/1000) x 3
Exemple :
Sur cette approche VOR29 à Anvers (EBAW), le MAP se trouve à une distance de 0.8 nm de la piste. Le VDP serait de (408 x 1000) x 3 = 1.22.
Cela signifie qu’il faudrait commencer la descente à 1.22 nm de la piste pour descendre sur une pente de 3° depuis la MDA de 440 ft. Hors, si on se contente des 0.8 nm du MAP, on prend le risque d’arriver trop haut sur le plan et de devoir effectuer une approche interrompue.
5.4.3.1 Circle to Land
Dans le cas où il n’y a pas d’approche aux instruments disponible pour l’atterrissage sur une piste mais que la piste opposée en est pourvu, il est fréquemment prévu une procédure qui consiste à effectuer l’approche de cette dernière, puis aux minimas, d’embrayer vers un circuit à vue pour se poser sur la piste en question.
L’exécution de cette manœuvre est soumise à des minimas publiés.
Exemple :
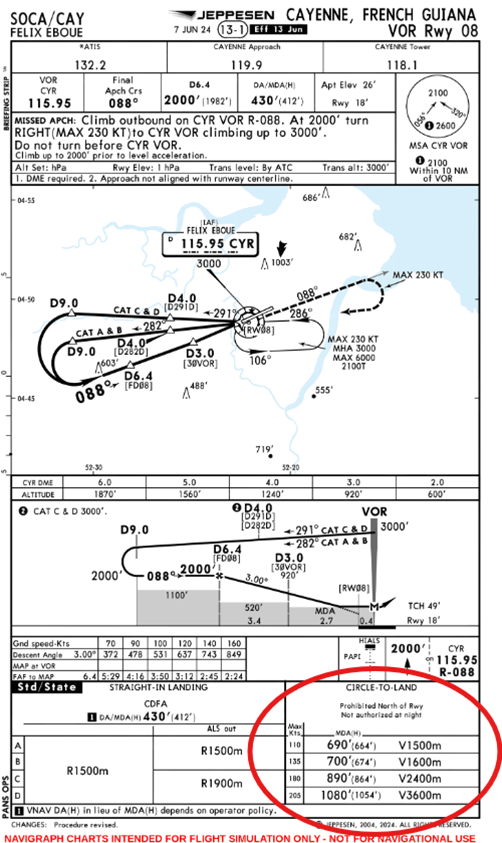
Au cas où, aucune approche n’est réalisable pour la piste 26 de Cayenne (SOCA), il est envisageable selon les conditions météorologiques de s’y poser en suivant l’approche VOR piste 08.
A la MDA(H) de 690 ft (Cat A), on vire à droite pour rejoindre la branche de vent arrière parallèlement à la piste, puis en étape de base pour tourner en approche finale et atterrir piste 08.
Remarque : Il est obligatoire d’avoir le visuel sur la piste une fois l’altitude 690 ft atteinte (664 ft de hauteur) et de disposer d’une visibilité de 1500 m. Dans le cas contraire, il faudra remettre les gaz et effectuer la procédure d’approche interrompue. De plus, il est interdit d’effectuer le circuit au nord du terrain, ce qui signifie que le circuit sera main gauche.
5.4.3.2 Approche à vue
Un vol aux peut également se conclure par une approche à vue pour diverses raisons :
- Pas de moyens aux instruments disponibles.
- Raccourcir le temps de vol en volant directement vers la piste.
- Sur demande de l’ATC.
Une fois autorisé, il suffit alors d’intégrer le circuit à vue en suivant les instructions de l’ATC (approche finale directe, vent arrière, etc…) et de procéder comme on le ferait en vol à vue (VFR).
Remarque :
Comme dans le cas du circle to land, l’autorisation d’approche à vue n’annule pas le plan de vol IFR mais permet d’effectuer l’approche vers la piste une fois le contact visuel établie avec celle-ci.